
Олег Измеров
ПРИЛОЖЕНИЕ: РАБОТА НАД МАГНИТОПЛАНОМ НА НЭВЗ В 90-Х
1. Основная концепция отечественной системы, cоздаваемой АО "НПО НЭВЗ" по разработке НИП "Транспорт с магнитным подвесом"
При разработке отечественной системы линейного электропривода и магнитного подвеса для пассажирского транспортного средства основные исходные требования сводились к следующему:
- система должна быть универсальной и пригодной для использования в широком диапазоне скоростей 0-300 км/ч;
- система должна иметь пассивную путевую структуру;
- устройства тяги и подвеса экипажа должны располагаться под козырьком путевой структуры для исключения влияния снега и гололеда на ее работоспособность;
- исполнение системы привода и магнитного подвеса должно быть в виде автономных секций, позволяющих формировать транспортные средства любого назначения.
 Рис.1. Схема силового устройства привода и магнитного подвеса с АТПМ (а) и HSST (б) >>
Рис.1. Схема силового устройства привода и магнитного подвеса с АТПМ (а) и HSST (б) >>
В результате теоретических и экспериментальных исследований различных вариантов для системы линейного электропривода и магнитного подвеса было разработано силовое устройство, представленное на рис.1а и названное асинхронным тягово-подъемным модулем (АТПМ). Индуктор АТПМ состоит из U -образного магнитопровода (I) в пазах шихтованных полюсов которого размещается 3-х фазная якорная обмотка (2). На ярме индуктора располагается обмотка намагничивания (3). Путевой элемент (4) может быть выполнен как плоским, так и П-образным. В пазах его размещается коротко замкнутая обмотка (5) типа "беличья клетка". Магнитный поток от обмотки намагничивания создает основное усилие электромагнитного подвеса и замыкается в плоскости перпендикулярной направлению движения. В элементарных участках стержней короткозамкнутой путевой обмотки, находящихся под разными полюсами этот поток создает э.д.с. встречного направления, которые взаимно компенсируются. Ток обмотки намагничивания регулируется транзисторным преобразователем по сигналам бесконтактных датчиков зазора и ускорения. Якорная обмотка создает тяговое усилие, ее поток замыкается в продольной плоскости, что исключает также электромагнитную связь между нею и обмоткой намагничивания.
На рис.1б для сравнения приведена схема устройства тяги и подвеса экипажа HSST (японская технология High Speed System Transport, разрабатывавалась авиационной кампанией Japan Air Lines и была предназначена для городского пригородного и междугородного сообщения со скоростью движения до 250 км/ч).
Следует отметить, что путевые элементы системы с АТПМ более сложные, чем в системе HSST.
В таблице 1 приведены технико-экономические параметры разрабатываемых и опытных экипажей.
Таблица 1
Технико-экономические параметры опытных экипажей на магнитном подвесе с линейным электроприводом
На рис.2 приведены расчетные и заимствованные из технической литературы области изменения КПД и коэффициента мощности линейных двигателей.
2. Сравнение с другими видами транспорта.
В таблице 2 приведены данные технико-экономического сравнения транспортной системы с линейным электроприводом и магнитным подвесом, полученные фирмой Transrapid.
Таблица 2
3. Уровень разработки (на момент начала 90-х)
Изготовлены, проведены стендовые исследования выходных характеристик полномасштабных макетных образцов АТПМ в статическом режиме и режиме подвеса. Для исследования многоточечной системы привода и подвеса в режиме движения создана макетная тележка массой 6 т (рис. 3-1), которая является прообразом автономной секции. По каждому борту тележки располагается 3 индуктора.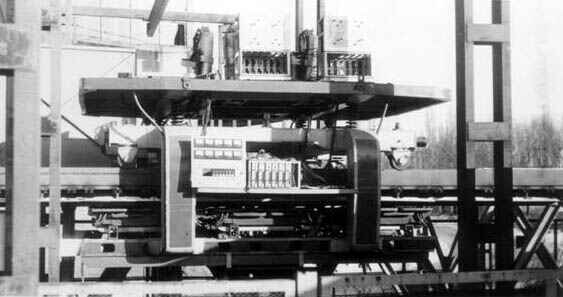 << Рис. 3-1. Макетная тележка массой 6 т. с асинхронными тягово-подъёмными модулями на линейном стенде
<< Рис. 3-1. Макетная тележка массой 6 т. с асинхронными тягово-подъёмными модулями на линейном стендеНа линейном стенде реализован устойчивый электромагнитный подвес по четырем каналам управления. Выполнены исследования тепловых характеристик АТПМ в режиме подвеса, определена экспериментально в длительном режиме удельная потребляемая мощность на подвес. Для обеспечения устойчивости подвеса использован эффект электромагнитного балансира. Осуществлены опытные поездки тележки в наиболее сложном режиме ползучей скорости и реверса на 10 метровом участке линейного стенда. В настоящее время ведутся работы по изготовлению путевых элементов на 50 м. Следует отметить, что для системы привода могут быть использованы статические преобразователи колесных транспортных средств с асинхронным приводом.
Выполнена предэскизная проработка системы для городского пассажирского транспортного средства.
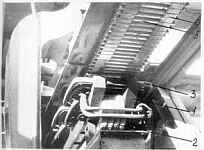


Рис.3-2. Фрагменты борта макетной тележки массой 6 т. с АТПМ на линейном стенде:
1-сердечник индуктора;
2-обмотка намагничивания;
3-якорная обмотка;
4-путевой магнитопровод;
5-путевая короткозамкнутая обмотка;
6-узел токоприёмника
Рис.4. Бесконтактный датчик зазора
4. Возможные схемы применения
А. Эстакадный пассажирский транспорт для связи центра города с развивавшимися микрорайонами, крупными транспортными узлами (вокзалы, морские и речные порты).Б. Автоматизированные транспортные тележки морских контейнерных терминалов.
В. Транспортные тележки промышленных установок.
Главный конструктор НИП "ТМП",
к.т.н. И.И.Талья
Таблица 3
| Масса вагона, т в том числе: масса кузова, т ходовой тележки, т Ширина вагона, м Высота вагона, м тело секций вагона Число ходовых тележек на секцию Масса полезного груза, т Максимальная скорость, км/ч Номинальная скорость, км/ч Номинальная сила тяги, кН Номинальный КПД, не менее Номинальный коэффициент мощности, не менее Удельная потребляемая мощность на подвес, не более, кВт/т Ускорение в режиме пуска, м/с2 Ускорение в режиме торможения, м/с2 Система привода и подвеса Охлаждение индуктора система подвеса Номинальный механический зазор,мм Путевая структура Высота опорной части, м Расстояние между опорами, м Расход материалов на I пог.м бетон, м2 арматура Активная часть привода и подвеса путевой структуры | 22,5 3,5 3,0 3,2 4,0 2 3 7,5 200 100 10 0,65 0,55 1,3 1,0 1,0 комбинированная с АТПМ воздушное, естественное Т-образная с железобетонными опорами и пролетными балками 10±1,5 электромагнитная с автономным регулированием 5 24 4,0 0,2 П-образный магнитопровод с короткозамкнутой обмоткой |
Информация была любезно предоставлена бывшим главным конструктором НИП "ТМП",к.т.н. И.И.Талья.
Обратно к разделу 5...