
![]() Первые
Первые![]() |
|![]() Начало внедрения
Начало внедрения![]() |
|![]() Реконструкция тяги
Реконструкция тяги![]() |
|![]() Новые решения
Новые решения![]() |
|![]() Литература
Литература![]() |
|![]() Страница автора
Страница автора
4. НОВЫЕ НАПРАВЛЕНИЯ В КОНСТРУИРОВАНИИ ТЯГОВЫХ ПРИВОДОВ
В разделе:
К данному историческому периоду относится время, когда в мире практически завешился переход на тепловую и электрическую тягу и по ряду причин (топливный кризис, экология, безопасность движения) резко обостряется конкуренция между рельсовым и безрельсовым транспортом. По времени этот период занимает конец 20 столетия и продолжается по наше время.
В данный период на конструкцию тягового привода стали оказывать следующие факторы:
- создание гибких автоматизированных производств позволило резко увеличить степень сложности крупных деталей, изготавливаемых методом механической обработки, сократив при этом объем требуемой регулировки и обработки по месту при монтаже;
- объединение производств подвижного состава в крупные глобализированные корпорации позволило, с одной стороны, использовать в производстве деталей привода все известные машиностроительные технологии, а с другой, повысило требования к простоте монтажа привода на тележке в условиях локальных филиалов производств;
- внедрение бесколлекторных тяговых электродвигателей (асинхронные, синхронные, синхронные с постоянными магнитами, индукторные) позволило снизить вес тягового электродвигателя и смягчить требования к его виброзащищенности, что привело к пересмотру ранее сложившихся критериев выбора схемы привода для различных эксплуатационных условий, а также к возрождению интереса к конструктивным схемам, ранее признанным нерациональными из-за большого веса и сложности;
- широкое внедрение автоматизированного проектирования и математического моделирования динамики экипажа и напряженного состояния деталей привода позволило проектировать механизмы привода сложной расчетной схемы.
С другой стороны, совершенствование технологии изготовления деталей привело к тому, что в ряде случаев требованиям производителя и потребителя удовлетворяли консервативные технические решения, элементы которых появились в 30-50-е годы 20 века.
4.1. Совершенствование консервативных решений привода.
 Примером совершенствования традиционной схемы может служить, к примеру, тяговый редуктор для высокоскоростного поезда ICE3, разработанный компанией Foith Turbo. Перед разработчиками была поставлена новая задача - существенное снижение уровня шума. Этого удалось достичь увеличением коэффициента перекрытия в зубчатом зацеплении, что, в свою очередь, было достигнуто увеличением наклона зубьев косозубых колес. Это, в свою очередь, привело к увеличению боковых сил, действующих на подшипники редуктора. Для восприятия этих повышенных сил на валу малого колеса редуктора был установлен подшипник с четырехточечным контактом и были применены конические осевые подшипники. Корпус редуктора был изготовлен из алюминиевых сплавов. Форма корпуса редуктора была вырана из требования обеспечить высокую жесткость при воздействии осевых сил в передаче. В расчетах профиля зубьев шестерни учитывали деформации корпуса редуктора, обусловленные воздействием вращающего момента. Проверочный расчет деформаций был произведен методом конечных элементов.
Примером совершенствования традиционной схемы может служить, к примеру, тяговый редуктор для высокоскоростного поезда ICE3, разработанный компанией Foith Turbo. Перед разработчиками была поставлена новая задача - существенное снижение уровня шума. Этого удалось достичь увеличением коэффициента перекрытия в зубчатом зацеплении, что, в свою очередь, было достигнуто увеличением наклона зубьев косозубых колес. Это, в свою очередь, привело к увеличению боковых сил, действующих на подшипники редуктора. Для восприятия этих повышенных сил на валу малого колеса редуктора был установлен подшипник с четырехточечным контактом и были применены конические осевые подшипники. Корпус редуктора был изготовлен из алюминиевых сплавов. Форма корпуса редуктора была вырана из требования обеспечить высокую жесткость при воздействии осевых сил в передаче. В расчетах профиля зубьев шестерни учитывали деформации корпуса редуктора, обусловленные воздействием вращающего момента. Проверочный расчет деформаций был произведен методом конечных элементов.
 Т.к. в качестве передаточного механизма была использована жесткая зубчатая муфта, пришлось пойти на такой консервативный вариант подвески осевого редуктора, как траверса с амортизаторами. При расчете кронштейна траверсы учитывались ударные нагрузки, возникающие в режиме короткого замыкания ТЭД. В связи с ударным характером нагрузки при проектировании кронштейна пришлось отказаться от применения алюминиевых сплавов, форма определялась путем минимизации массы делали моделированием методом конечных элементов. После первой итерации определялись объемы, где были наименьшие напряжения, их исключали из схемы, повторяли моделирование и так 15 итераций, после которых контур детали был сглажен и уточнен с точки зрения требований технологии формообразования.
Т.к. в качестве передаточного механизма была использована жесткая зубчатая муфта, пришлось пойти на такой консервативный вариант подвески осевого редуктора, как траверса с амортизаторами. При расчете кронштейна траверсы учитывались ударные нагрузки, возникающие в режиме короткого замыкания ТЭД. В связи с ударным характером нагрузки при проектировании кронштейна пришлось отказаться от применения алюминиевых сплавов, форма определялась путем минимизации массы делали моделированием методом конечных элементов. После первой итерации определялись объемы, где были наименьшие напряжения, их исключали из схемы, повторяли моделирование и так 15 итераций, после которых контур детали был сглажен и уточнен с точки зрения требований технологии формообразования.
4.2. Блочная конструкция тягового привода.
В настоящее время продолжаются попытки достичь большей интеграции тягового электродвигателя привода с другими элементами привода, в частности с осевым редуктором.
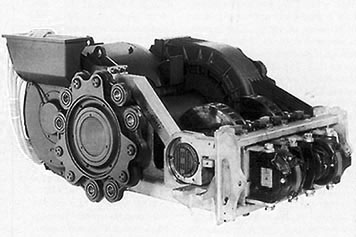
 Примером такого решения может служить опорно-осевой тяговый привод электровоза EG3100 производства фирмы Сименс и использующего на ж.д. Дании. Электровоз развивает силу тяги 67 кН на ось, максимальная скорость 140 км/ч., мощность ТЭД в продолжительном режиме 1080 кВт. Несмотря на сравнительно высокую скорость, конструкторы остановились на опорно-осевой схеме. Это стало возможным благодаря применению АТД, имеющих достаточную виброустойчивость и меньшую массу по сравнению с коллекторными двигателями.
Примером такого решения может служить опорно-осевой тяговый привод электровоза EG3100 производства фирмы Сименс и использующего на ж.д. Дании. Электровоз развивает силу тяги 67 кН на ось, максимальная скорость 140 км/ч., мощность ТЭД в продолжительном режиме 1080 кВт. Несмотря на сравнительно высокую скорость, конструкторы остановились на опорно-осевой схеме. Это стало возможным благодаря применению АТД, имеющих достаточную виброустойчивость и меньшую массу по сравнению с коллекторными двигателями.
В этом приводе с одной стороны двигатель через роликовый подшипник опирается на ось колесной пары, а с другой — на поперечную балку тележки через маятниковую опору с резиновым упругим элементом. Крутящий момент передается от него на колесную пару через одноступенчатый редуктор, образованный малым зубчатым колесом, имеющимся на конце вала тягового двигателя, и большим зубчатым колесом, насаженным на ось колесной пары горячим способом. Корпус редуктора выполнен несущим. Линия его разъема с лабиринтным уплотнением проходит у подшипникового щита со стороны малого зубчатого колеса.
Таким образом, конструкторам удалось уйти от консольного расположения малого зубчатого колеса, не увеличивая общее число подшипников в тяговом приводе и не вводя компенсирующей муфты между двигателем и зубчатой передачей.
 В опорно-рамном приводе фирмы Siemens для вагонов метро серии С тяговый двигатель также прифланцован к корпусу редуктора. Вал ротора двигателя с помощью центрирующей муфты жестко соединен с валом шестерни редуктора, имеющим с обоих концов подшипники. Благодаря этому для двигателя не требуется подшипниковый щит со стороны редуктора. Передача тягового момента на колесную пару осуществляется с помошью полого карданного вала на оси колесной пары с поводковыми муфтами. Благодаря малым габаритам асинхронного тягового двигателя 2KF1914-0JА03 относительно небольшой мощности (100 кВт), поводковые муфты размещаются в пространстве между корпусом двигателя и осью.
В опорно-рамном приводе фирмы Siemens для вагонов метро серии С тяговый двигатель также прифланцован к корпусу редуктора. Вал ротора двигателя с помощью центрирующей муфты жестко соединен с валом шестерни редуктора, имеющим с обоих концов подшипники. Благодаря этому для двигателя не требуется подшипниковый щит со стороны редуктора. Передача тягового момента на колесную пару осуществляется с помошью полого карданного вала на оси колесной пары с поводковыми муфтами. Благодаря малым габаритам асинхронного тягового двигателя 2KF1914-0JА03 относительно небольшой мощности (100 кВт), поводковые муфты размещаются в пространстве между корпусом двигателя и осью.
 Тяговый редуктор - двухступенчатый, с погружным масляным охлаждением зубчатых колес. Общая масса двигателя и редуктора составляет 885 кГ, из которых на редуктор приходится 294 кг. Со стороны редуктора, противоположной полому валу, на оси колесной пары размещен диск тормоза.
Тяговый редуктор - двухступенчатый, с погружным масляным охлаждением зубчатых колес. Общая масса двигателя и редуктора составляет 885 кГ, из которых на редуктор приходится 294 кг. Со стороны редуктора, противоположной полому валу, на оси колесной пары размещен диск тормоза.
Крепление моторно-редукторного блока к раме тележки - консольное, в трех точках, две на редукторе и одна на остове тягового двигателя. Для устранения статической неопределимости в верхней точке крепления осевого редуктора используется резиновый амортизатор.
 В конструкции тягового привода с полым карданным валом отечественного электропоезда ЭД6 производства Демиховского машиностроительного завода с конструкционной скоростью 160 км/час тяговый электродвигатель прифланцован к тяговому редуктору через переходный узел, в котором размещена резинометаллическая компенсирующая муфта, а также приреплен остовом к шкворневой балке рамы тележки. Корпус тягового редуктора крепится одник концом к шкворневой балке, а другим - к концевой балке рамы тележки. При данной схеме подвешивания может возникать статическая неопределимость, вызванная избыточной связью остова тягового двигателя с рамой тележки. Для устранения избыточной связи можно либо отказаться от дополнительной точки подвешивания тягового двигателя к тележке, как это сделано в описанном ниже приводе системы Taurus, либо крепить тяговый двигатель и зубчатую передачу раздельно к раме и применить муфту с большей компенсирующей способностью.
В конструкции тягового привода с полым карданным валом отечественного электропоезда ЭД6 производства Демиховского машиностроительного завода с конструкционной скоростью 160 км/час тяговый электродвигатель прифланцован к тяговому редуктору через переходный узел, в котором размещена резинометаллическая компенсирующая муфта, а также приреплен остовом к шкворневой балке рамы тележки. Корпус тягового редуктора крепится одник концом к шкворневой балке, а другим - к концевой балке рамы тележки. При данной схеме подвешивания может возникать статическая неопределимость, вызванная избыточной связью остова тягового двигателя с рамой тележки. Для устранения избыточной связи можно либо отказаться от дополнительной точки подвешивания тягового двигателя к тележке, как это сделано в описанном ниже приводе системы Taurus, либо крепить тяговый двигатель и зубчатую передачу раздельно к раме и применить муфту с большей компенсирующей способностью.
4.3. Интеграция тягового привода с другими элементами экипажа.
Развитие скоростного движения привело к созданию конструкций тягового привода, в котором его традиционные компоненты (двигатель, подвеска, редуктор, передаточный механизм) были интегрированы с другими компонентами экипажа, в частности, с дисковым тормозом.
Примером может служить тяговый привод электровозов серий 1016/1116 семейства Taurus производства фирмы Siemens. В тяговом приводе используется АТД с мощностью в продолжительном режиме 1600 кВт, осевая сила тяги при трогании с места 75 кН, максимальная скорость 230 км/ч. Тяговый привод выполнен опорно-рамным, с полым карданным валом на оси и поводковыми муфтами со встречным расположением поводков. Тяговая передача одновременно приводит во вращение вал с расположенными на нем тормозными дисками, размещенный по лругую сторону от полого вала. В поводках муфты использованы шарниры фирмы Spherilastik. Вал с тормозными дисками вращается быстрее ведомого вала, за счет чего достигается уменьшение размеров дисков.
 В приводе используется тяговая передача с арочным зубом.
В приводе используется тяговая передача с арочным зубом.
Так же, как и в опорно-осевом приводе электровоза EG3100 той же фирмы, в приводе Taurus тяговый двигатель интегрирован с тяговым редуктором. Ось якоря двигателя с малым зубчатым колесом опирается с одной стороны на подшипник щита корпуса двигателя, а с другой - на подшипник в корпусе редуктора. Тяговый двигатель выполнен без корпуса, который заменяет сварной пакет статорных листов.
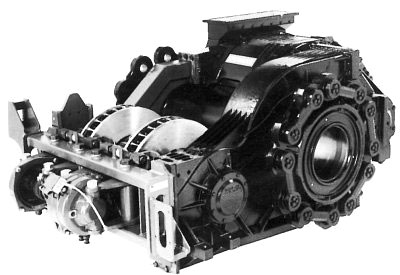 Подшипники большого зубчатого колеса опираются на корпус редуктора, в котором также на симметрично расположенных опорах размещено зубчатое колесо вала тормозных дисков. Другой конец вала через болтовое соединения связан с остовом ТЭД.
Подшипники большого зубчатого колеса опираются на корпус редуктора, в котором также на симметрично расположенных опорах размещено зубчатое колесо вала тормозных дисков. Другой конец вала через болтовое соединения связан с остовом ТЭД.
Конструкция требует высокой точности изготовления корпусных деталей, предотвращения коробления их со временем, а также тщательно продуманной технологии монтажа, в связи с многозвенными размерными цепями, влиящими на перекос зубчатых колес и возможности статической неопределимости вала тормозных дисков при монтаже.